
بقلم الدكتور المهندس محمد ملحم*
تمهيد
لا نبالغ إذا قلنا أنّ الذكاء الصنعي Artificial intelligence وتكنولوجيا النانو nanotechnology هما الجناحان الحاملان للتطور التكنولوجي في العقدين الماضيين، وهما إحدى الركائز الأساسية التي تقوم عليها تكنولوجيا الصناعة في العصر الحالي. الذكاء الصنعي: هو قدرة الآلات والحواسيب على القيام بمهام تُحاكي وتُشابه تلك التي تقوم بها الكائنات الذكيّة؛ كالتفكير والتعلُم من تجارب سابقة. كما يهدف الذكاء الصنعي إلى الوصول إلى أنظمة تتمتع بالذكاء وتتصرف على النحو الذي يتصرف به البشر من حيث التعلُم واتخاذ القرار المناسب. وأهم أشكال الذكاء الصنعي هو التعلم الآلي Machine Learning، وفي مرحلة لاحقة (2005) التعلم العميق Deep Learning الذي يحاكي في بنيته شبكة الخلايا العصبية الدماغية، وهو على درجة عالية من الكفاءة والفاعلية وله تطبيقات كبيرة جداً.
أما تكنولوجيا النانو: فهي هندسة النظم الوظيفية على المستوى الجزيئي، وفي معناها الأصلي تشير تكنولوجيا النانو إلى استخدام المادة على نطاق ذري وجزيئي وفوق الجزيئي للأغراض الصناعية. وعُرّفت تكنولوجيا النانو لاحقاً على أنها معالجة للمادة ذات بعد واحد بحجم 1 إلى 100 نانومتر. لتكنولوجيا النانو تطبيقات كثيرة مثل علوم السطح والكيمياء العضوية والبيولوجيا الجزيئية وفيزياء أنصاف النواقل وتخزين الطاقة والهندسة الكلية والجزيئية والتصنيع الدقيق. اكتسب هذا المجال في القرن الحادي والعشرين اهتماماً علمياً وسياسياً وتجارياً متزايداً، وبدأ تسويق المنتجات القائمة على تكنولوجيا النانو في الظهور، مثل استخدام الجسيمات النانوية الفضية كعامل مضاد للبكتيريا، وواقيات الشمس الشفافة القائمة على الجسيمات النانوية، وتقوية ألياف الكربون باستخدام جزيئات السيليكا النانوية، والأنابيب النانوية الكربونية للمنسوجات المقاومة للبقع وغيرها.
التعرف على حركات وإيماءات أصابع اليد
قام فريق من الباحثين في جامعة سيؤل الوطنية وجامعة ستانفورد بتطوير شبكة نانوية (على شكل جلد رقيق) مصنوعة من مواد متوافقة حيوياً يتم طباعتها مباشرة على يد الإنسان، وتحاكي المستقبلات الجلدية البشرية عن طريق ترجمة تغيرات المقاومة الكهربائية على امتداد الجلد إلى إحساس يحاكي الإحساس البشري. تستطيع هذه الشبكة النانوية قياس وتحديد حركات الأصابع في وقت واحد عن طريق جمع المعلومات من نقاط متعددة. تم ربط هذه الشبكة مع نظام حاسوبي قائم على أساس خوارزمية تعلم آلي تعتمد على التأخير الزمني للتفريق بين إشارات الحركة المختلفة للأصابع. تم تطوير هذه الخوارزمية للتكيف بسرعة مع مختلف المستخدمين ولتنفيذ مهام متعددة.
تجمع التكنولوجيا الجديدة بين قدرة التعلم في الذكاء الصنعي مع جلد نانوي قادرة على فك رموز حركات اليد البشرية والتعرف على الكتابة ولغة الإشارة والأشياء البسيطة المألوفة. تتفوق هذه التكنولوجيا على سابقاتها، فهي لا تحتاج إلى أجهزة مساعدة كالكاميرات أو الحساسات أو أجهزة تتبّع حركة، بالإضافة إلى حجمها الفيزيائي الصغير إذا ما قورنت بالقفازات والجلود الإلكترونية المستخدمة لنفس الوظيفة.
تعتمد التقنية الجديدة على أربطة على المعصم والأصابع لتعمل كحساسات إجهاد عند كل مفصل لقياس الإشارات الكهربائية التي تنتجها العضلات، وبحسب مطوّري هذه التكنولوجيا فهي تتميز بسرعة التعرف على حركات اليد وتفسيرها بمعطيات محدودة وأقل تدريب ممكن. إلى جانب استخدامها في الألعاب والواقع الافتراضي، تسمح تقنية التعرف على المهام اليدوية الجديدة للأشخاص بالتواصل مع الآخرين ومع الآلات باستخدام الإيماءات، بالإضافة إلى تطبيقات أخرى على درجة عالية من الأهمية مثل العمليات الجراحية عن بُعد، وأيضاً يمكن استخدامها بالروبوتات والأطراف الصناعية للتعرف على الأشياء والحركة.
أما التقنيات السابقة، فاعتمدت على كاميرات تعمل على تعقب حركات الإنسان وتفسيرها باستخدام التعلم الآلي. وهذه الأخيرة تحتاج إلى التقاط صورٍ عدّة مأخوذة من زوايا مختلفة، وهذا الأمر يتطلب عدة كاميرات لتحقيق التعرف على إيماءات اليد الفردية. تعاني أنظمة الكاميرات المتعددة من قيود مرتبطة بمحدودية حساسات الرؤية، كعدم قدرة الكاميرات على تغطية كامل مساحة العمل، فضلاً عن الأخطاء التي تحدث عند حجب يد عن الرؤية. يرافق ذلك برمجيات متعبة ومرهقة أيضاً، اعتمد فيها الباحثون على التعلم الآلي القائم على خوارزميات التعلم الخاضع للإشراف والعمليات الحسابية المعقدة. بالإضافة إلى الحاجة إلى كمية كبيرة من البيانات لكل مستخدم ولكل مهمة، وكلها تحتاج إلى تدخل بشري لتصنيفها.
لجعل نظام التعرف على الحركة أكثر انسيابية، ركّز فريق الباحثين في جامعة سيؤل الوطنية وجامعة ستانفورد على جعل كل من الحساسات والخوارزميات أكثر فاعلية. حاول الفريق إنشاء نظام للتعرف على الإيماءات بسيط من حيث الشكل وقابل للتكيف بما يكفي للعمل مع أي مستخدم ومع المهام ذات البيانات المحدودة.
يتكّون النظام الجديد من جزأين رئيسيين، ذكرهما الفريق في مجلة Nature Electronics، الجزء الأول عبارة عن شبكة مصنوعة من ملايين الأسلاك النانوية من الفضة المطلية بالذهب والمضمّنة في طلاء بلاستيكي من مادة البولي يوريثين [1]. والشبكة متينة وقابلة للتمدد وتساعد المستشعر على الالتصاق بالجلد، وتتلاءم بشكل وثيق مع تجاعيد وثنيات إصبع من يرتديه. يمكن طباعة الشبكة مباشرة على الجلد باستخدام آلة محمولة، وهي رقيقة جداً وخفيفة الوزن لدرجة أنها تكاد تكون غير محسوسة. وهذه الشبكة متوافقة حيوياً مع الجلد، إذ تسمح له بالتنفس بشكل طبيعي، وتتحمل عدة أيام من الاستخدام اليومي بما في ذلك غسل اليدين ما لم يتم فركه بالماء والصابون.
قام الفريق بطباعة الشبكة مباشرة على ظهر يد المستخدم إلى نهاية السبابة (Fig.1)، تستشعر شبكة الأسلاك النانوية تغيرات طفيفة في المقاومة الكهربائية عند تمدد الجلد تحتها. وأثناء تحرك اليد، تخلق الشبكة النانوية أنماط إشارة فريدة ترسلها لاسلكياً عبر وحدة Bluetooth خفيفة الوزن إلى الحاسب للمعالجة.

أما الجزء الثاني، وهو الجزء المرتبط بالذكاء الصنعي، حيث يقوم نظام تعلم آلي بتحديد أنماط التغير في التوصيل الكهربائي وتحويلها إلى مهام وإيماءات فيزيائية موافقة. استخدم الباحثون الحركات العشوائية لليد والأصابع من ثلاثة مستخدمين مختلفين لمساعدة الذكاء الصنعي لتعلم الترابط والتوافق العام بين الحركات.
بعد ذلك قام الفريق الباحث بتدريب النظام على التمييز بين أنماط الإشارة الناتجة عن مهام محددة مثل الكتابة على الهاتف، والكتابة على لوحة المفاتيح، والتفاعل والإمساك بستة كائنات مختلفة الشكل.
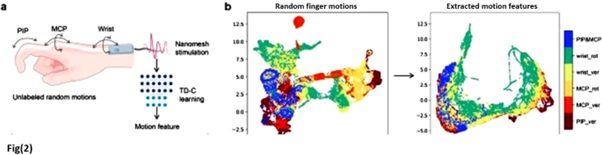
بغرض تدريب النموذج المُقترَح، أنشأ الفريق مجموعة بيانات صغيرة من خلال الطلب من كل مستخدم القيام بتكرار إيماءات فردية تتعلق بالمهام السابقة خمس مرات، حيث يبيّن Fig2 المناطق التي تغطيها حركات الأصبع العشوائية والمأخوذة من ثلاث مناطق قياس (PIP, MCP, Wrist)، ومن ثمّ تمّ استخلاص الميزات الأساسية من هذه الحركات العشوائية اللازمة لبناء مجموعة البيانات الخاصة بتدريب خوارزمية التعلم الآلي. تمكنت خوارزمية التعلم الآلي بعد التدريب على مجموعة البيانات المقترحة من التمييز بين كتابة حرفٍ معينٍ على لوحة المفاتيح، أو تتبّع سطح مائل لهرم.
وأثناء الاختبارات، تمكّن النظام بعد ذلك من التعرف على الأشياء التي يحتفظ بها المستخدم والجمل التي يكتبها مستخدم جديد على لوحة مفاتيح. المخطط التعليمي المتبع في تدريب خوارزمية التعلم الآلي أكثر كفاءة من الناحية الحسابية، ومتعدد الاستخدامات، حيث يمكنه التكيف بسرعة مع مختلف المستخدمين ومع مهام مختلفة.
خاتمة
يعمل فريق الباحثين حالياً على تطوير هذا الجهاز ليركّب على أصابع متعددة للسماح بالتقاط مجموعة أكبر من حركات اليد، وهذا الأمر سيؤدي إلى كمية أكبر من البيانات التي تحتاج إلى تحليل. بالتالي وبحسب تقدير الباحثين، لتحقيق الدقة المطلوبة فإنّ العبء الحسابي سيزداد، وخلق حالة توازن بين الأمرين هو الهدف الأساسي لنظام الذكاء الصنعي الخاص بالتعرف على حركات وإيماءات أصابع اليد في المستقبل.
= = = = =
*الدكتور المهندس محمد ملحم – أستاذ مساعد في كلية تكنولوجيا المعلومات والاتصالات – جامعة طرطوس.
References
1-Kim, Kyun Kyu, et al. “A substrate-less nanomesh receptor with meta-learning for rapid hand task recognition.” Nature Electronics (2022): 1-12.
جميع الآراء الواردة في هذه المقالة لا تعبّر بالضرورة عن رأي مركز جي إس إم وإنما تعبّر عن رأي صاحبها حصراً